
Açıklama
Hangi Sensör ROS ile en iyi şekilde çalışır?
MicroStrain, robot uygulamaları oluşturmanıza yardımcı olan Robot İşletim Sistemi (ROS) sürücülerini çalıştıran çeşitli Eylemsizlik Ölçüm Birimleri (IMU’lar) ve Eylemsizlik Navigasyon Sistemleri (INS’ler) sunar. Aşağıda CX ve CV ürünlerinin C-Serisi sensör tekliflerimizi ve GQ ve GX ürünlerinin G-Serisi sensör tekliflerimizi inceleyin.
Geniş ürün yelpazemizi görmek için MicroStrain Atalet Sensörleri’ni ziyaret edin .
ÇARPMA
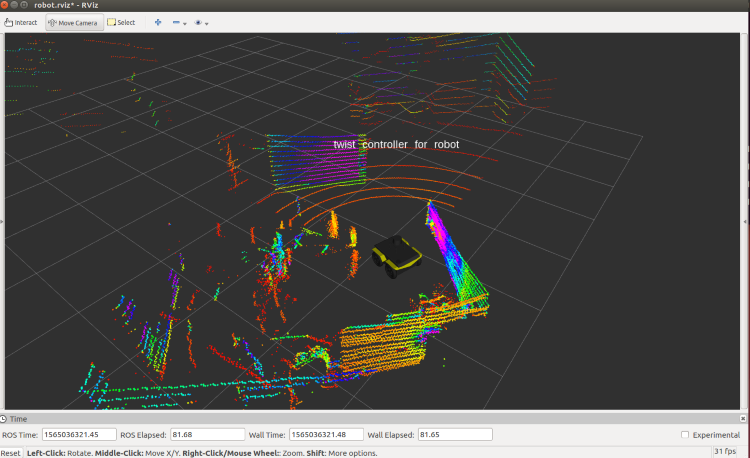
SLAM (Eş Zamanlı Yerelleştirme ve Haritalama), bir cihaz, robot, drone veya diğer otonom araçların konum farkındalığına sahip olması ve bulunduğu ortamın haritaya kaydedilmesidir.
SLAM kullanan bir robot, çevresini anlamak için radar, lidar, kameralar, IMU’lar ve diğer teknolojiler gibi çeşitli sensörler kullanır. Çevresini ve içinde nasıl hareket ettiğini anlayarak, bir robot daha etkili bir şekilde haritalama yapabilir, gezinebilir ve/veya engellerden kaçınabilir. İyi bir IMU bu süreç için olmazsa olmazdır. Robotun gerçek hareketini (sadece teorik değil) doğru bir şekilde ölçmek önemli ölçüde üstün sonuçlara yol açacaktır.

ROS Ortaklığı
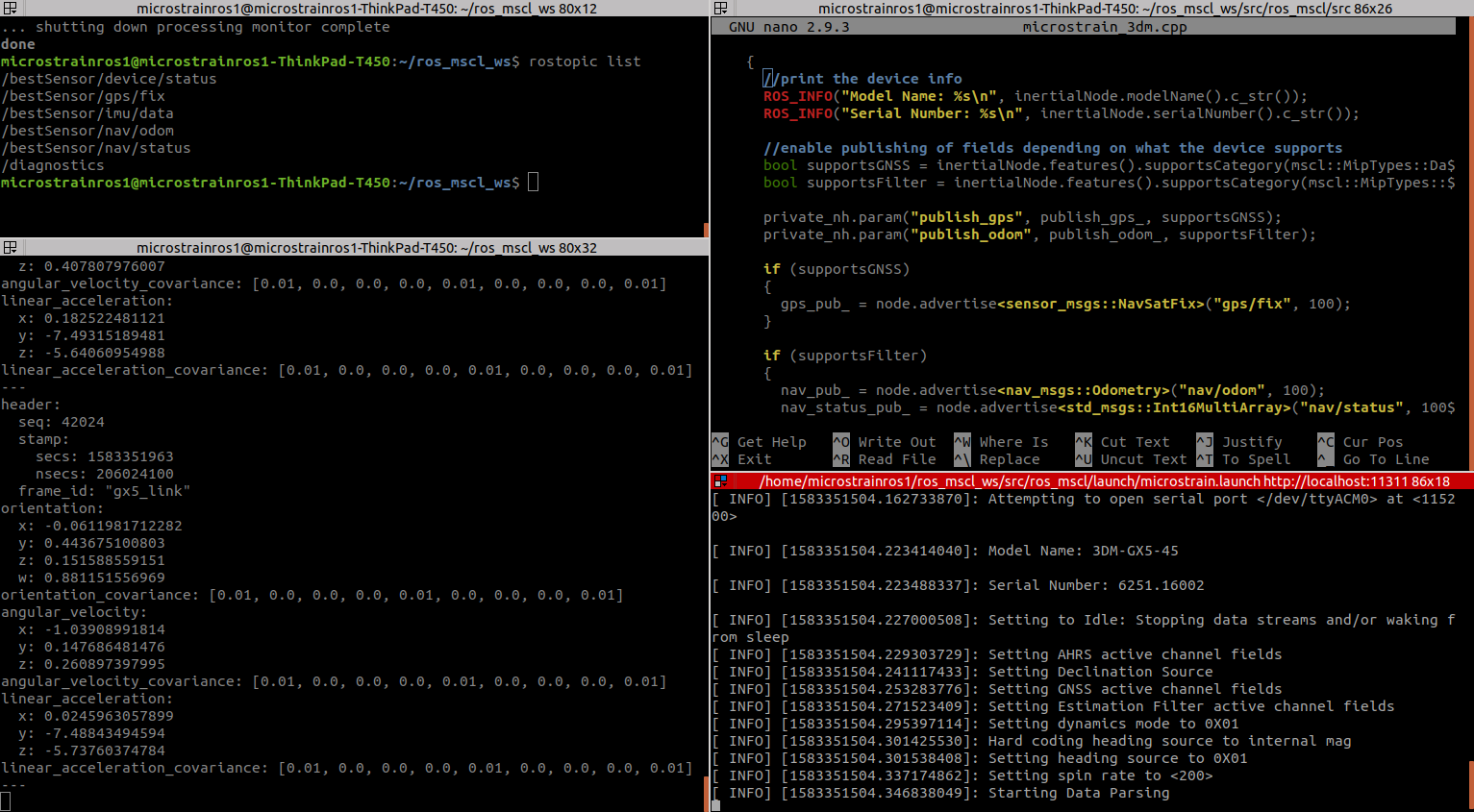
Clearpath, önde gelen bir robot geliştiricisidir. LORD Microstrain, MicroStrain IMU ROS Sürücüleri için temel özellikler sağlamak üzere Clearpath Robotics ile ortaklık kurmuştur. SLAM kullanan bir robot, çevresini anlamak için radar, lidar, kameralar, IMU’lar ve diğer teknolojiler gibi çeşitli sensörler kullanır. Çevresini ve içinde nasıl hareket ettiğini anlayarak, bir robot daha etkili bir şekilde haritalama yapabilir, gezinebilir ve/veya engelleri önleyebilir. Bu süreç için iyi bir IMU olmazsa olmazdır. Robotun gerçek hareketini (sadece teorik değil) doğru bir şekilde ölçmek önemli ölçüde üstün sonuçlara yol açacaktır. Ek olarak, tanılama bilgileri ROS aracılığıyla sürekli olarak yayınlanır ve kullanıcıların IMU’nun farklı özelliklerinin durumunu görmelerini sağlar.
Daha fazla ayrıntı için Clearpath & LORD Microstrain ROS Sürücüsünü ziyaret edin .
Demolar ve Eğitimler
ROS-MSCL sistemimiz ihtiyaçlarınızı karşılamıyorsa, yine de ürünlerimizi kullanarak kod geliştirebilirsiniz.
Kablosuz ve eylemsiz aygıtlarımızla nasıl iletişim kuracağınıza dair düşük seviyeli ayrıntılar için GitHub’ın Protokol Bölümünü ziyaret edin. Komutlar, yapılandırma ayarları ve veri paketi belgeleri mevcuttur.

Mikrogerinim Desteği
LORD Microstrain, sensörlerimizi çözümlerinize entegre etmenize yardımcı olabilecek uygulama mühendislerine sahiptir. Bizimle iletişime geçin
Robotik İşletim Sistemi ve entegrasyonu ile ilgili sorularınızı birinci sınıf teknik destek ekibimize yönlendirebilirsiniz.
Hangi sensör ROS ile çalışır?
MicroStrain, robot uygulamaları oluşturmanıza yardımcı olmak için Robot İşletim Sistemi (ROS) sürücüleriyle iyi çalışan çeşitli Eylemsizlik Ölçüm Sistemleri (IMU’lar) sunar. C-Serisi ve G-Serisi sensörlerimizi görüntülemek için aşağıya tıklayın.
Tüm sensörlerimizi görüntülemek için MicroStrain Sensörlerini ziyaret edin .




Değerlendirmeler
Henüz değerlendirme yapılmadı.